CMU Biorobotics
Robots
Research
All
confined space robotics
expeditionary robotics
full stack autonomy
locomoting systems
medical robotics
modular robotics
multi-agent planning
multi agent reinforcement learning
recycling robotics
simultaneous localization and mapping
skill learning
space robotics
Applications
Pictures & Video
Publications
People
Research and Education Agenda for Howie Choset
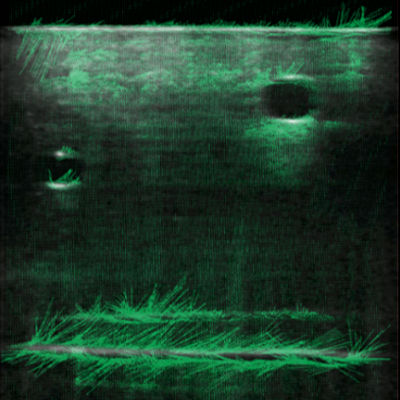
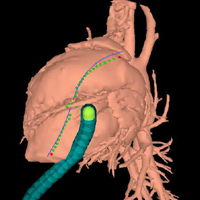
Implicit 3D Functions for Ultrasound
Ergodic Search
Autonomous Exploration
Confined-Space Sensing
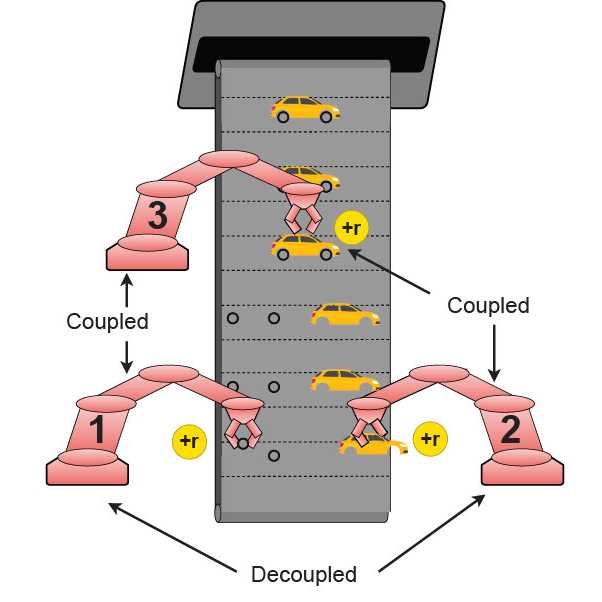
Reward Decoupling for Multi-Agent RL
Pipe SLAM
Multi-Agent Comms Learning
Skill Learning
Full Stack Autonomy
E-waste Recycling
Global Long-Horizon Planning for Dynamical Systems
Biologically Inspired Robot Locomotion
Snake Robot Systems
Multi-Agent Path Finding
Modular Robotics
On-Orbit Servicing
Vertical Robot Transport
Surgical Snake Robot
Body SLAM
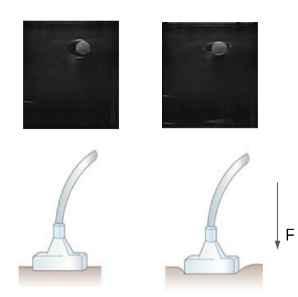
Punctate Pressure
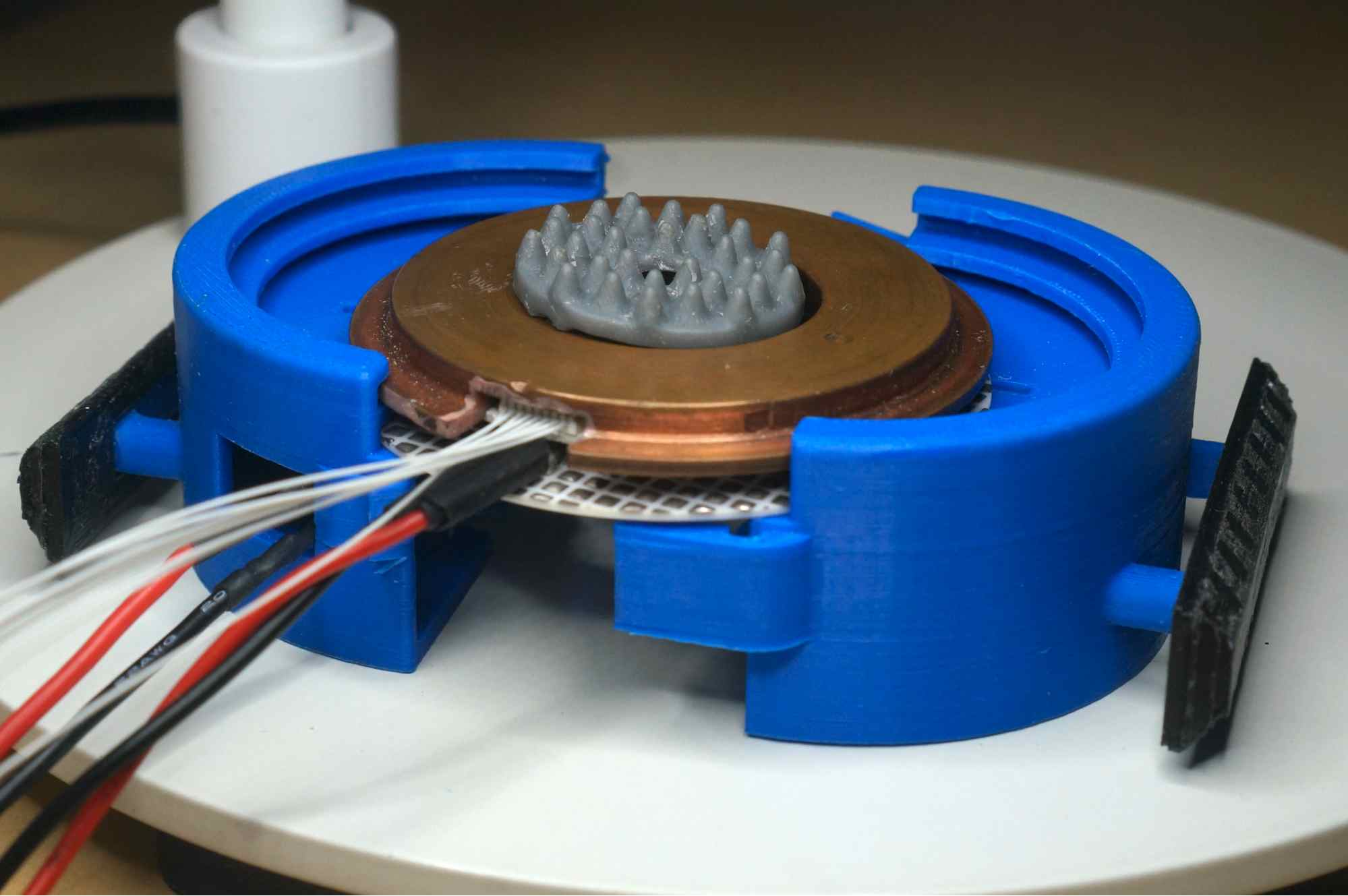
Force-Controlled Ultrasound Scanning
Deformation Modeling
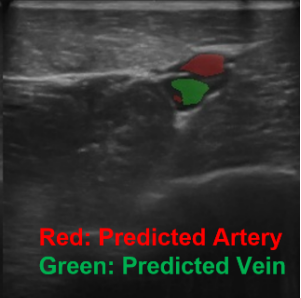
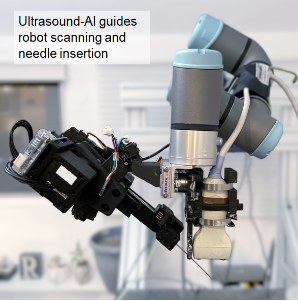
Ultrasound AI
Automatic Needle Insertion